
6.2. Applied Stochastic Analysis’s home work 2¶
6.2.1. No.1¶
omitting..
6.2.2. No.2¶
Testify the half order convergence of MC through a numerical example.
Here is the code:
1function ans=hw2_2()
2for i = 1:10
3 res(i)=estimate();
4end
5ans = mean(res);
6
7end
8
9function ans=estimate()
10syms x;
11f = sin(pi*x);
12I = int(f,0,1);
13N = [4,8,16,32,64,128,256,512]*10;
14for i = 1:8
15 res(i)=I-mc(N(i),f,x);
16end
17res=abs(double(res));
18ans=polyfit(log(N),log(res),1);
19ans = -ans(1);
20end
21
22function ans=mc(n,f,x)
23
24ans = mean(subs(f,x,rand(n,1)));
25end
6.2.3. No.3¶
How many ways can you give to construct the uniform distribution on \(S^2\) . Implement them and make a comparison.
Set \(\theta\) and \(\phi\) be the spherical coordinates. Here I got three mechod:
Let \(\theta\) be the uniform distribution of \([0,2\pi)\) and \(P_{\phi}=\frac{1}{2}sin\phi\)
pick \(u=cos\phi\) to be uniformly distributed on \([-1,1]\), and \(\theta\) the same as above.
Marsaglia (1972) derived an elegant method that consists of picking \(x_1\) and \(x_2\) from independent uniform distributions on \((-1,1)\) and rejecting points for which \(x_1^2+x_2^2\geq 1\) . From the remaining points.
Here is the code:
1function hw2_3()
2
3 num =10000;
4 subplot(2,2,1);
5 [a,b,c]=sphere();
6 mesh(a,b,c);
7 hold
8 Title('Method a');
9 tic
10 [x,y,z]=sphere1(num);
11 toc
12 plot3(x,y,z,'.');
13
14
15 subplot(2,2,2);
16 [a,b,c]=sphere();
17 mesh(a,b,c);
18 hold
19 Title('Method b');
20 tic
21 [x,y,z]=sphere2(num);
22 toc
23 plot3(x,y,z,'.');
24
25 subplot(2,2,3);
26 [a,b,c]=sphere();
27 mesh(a,b,c);
28 hold
29 Title('Method c');
30 tic
31 [x,y,z]=sphere3(num);
32 toc
33 plot3(x,y,z,'.');
34end
35
36function [x,y,z]=sphere1(n)
37 x=zeros(1,n);
38 y=zeros(1,n);
39 z=zeros(1,n);
40 for i=1:n
41 theta = 2*pi*rand;
42 phi = acos(1-2*rand);
43 s = sin(phi);
44 x(i) = cos(theta)*s;
45 y(i) = sin(theta)*s;
46 z(i) = cos(phi);
47 end
48end
49
50function [x,y,z]=sphere2(n)
51
52 x=zeros(1,n);
53 y=zeros(1,n);
54 z=zeros(1,n);
55 for i=1:n
56
57 theta = 2*pi*rand;
58 u = rand*2-1;
59 s = sqrt(1-u^2);
60 x(i) = s*cos(theta);
61 y(i) = s*sin(theta);
62 z(i) = u;
63 end
64
65end
66
67function [x,y,z]=sphere3(n)
68
69 x=zeros(1,n);
70 y=zeros(1,n);
71 z=zeros(1,n);
72 for i=1:n
73
74 x1 =2*rand-1;
75 x2 =2*rand-1;
76 p = x1^2+x2^2;
77 while p>=1
78 x1 =2*rand-1;
79 x2 =2*rand-1;
80 p = x1^2+x2^2;
81 end
82 s =sqrt(1-p);
83 x(i) = 2*x1*s;
84 y(i) = 2*x2*s;
85 z(i) = 1-2*p;
86 end
87end
And here is the result:
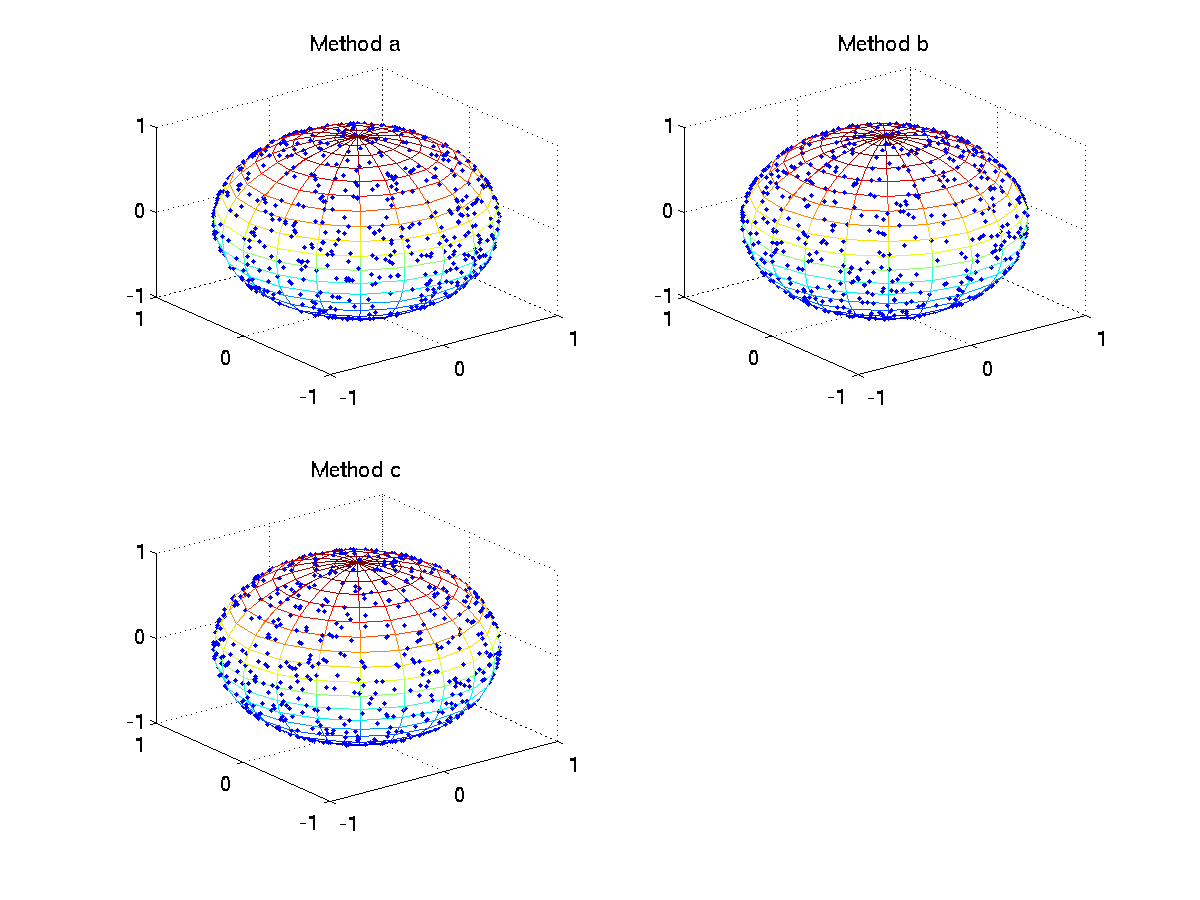
It’s obvius that the method c is the most effient, but not stable.
a: Elapsed time is 0.026833 seconds.
b: Elapsed time is 0.020886 seconds.
c: Elapsed time is 0.006588 seconds.
PS: I. Another easy way to pick a random point on a sphere is to generate three Gaussian random variables. #. Cook (1957) extended a method of von Neumann (1951) to give a simple method of picking points uniformly distributed on the surface of a unit sphere. This method only need multiply add, sub and divide.